"말로 찾으면 로봇이 간다"…GIST, 문장 이해 기반 3D 탐색 AI 개발
등록 2026.04.02 10:21:53
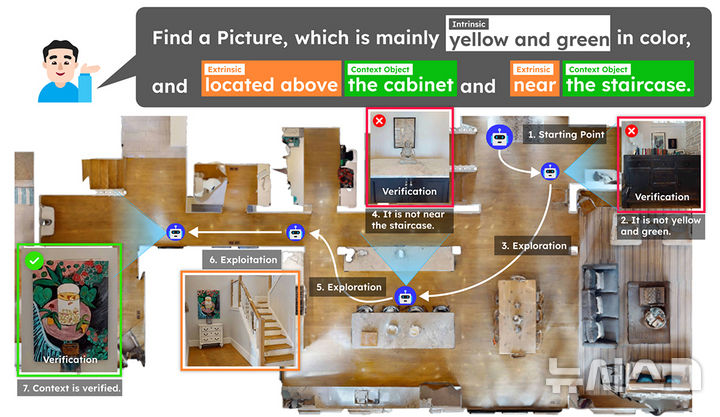
긴 문장 설명을 활용한 3차원 문맥 기반 로봇 탐색 과정. (그래픽=GIST 제공) [email protected]
[광주=뉴시스]이창우 기자 = 광주과학기술원(GIST)은 말로 설명한 물체를 3차원 공간에서 정확히 찾아내는 인공지능(AI) 로봇 내비게이션 기술(Context-Nav)를 개발했다고 2일 밝혔다.
AI융합학과 김의환 교수 연구팀이 개발한 이 기술은 물체의 색·모양뿐 아니라 주변 사물과의 상대적 위치까지 함께 분석해 로봇이 긴 문장 지시를 이해하고 목표를 탐색하도록 한다.
기존 강화학습 기반 방식이 방대한 데이터와 반복 학습에 의존했던 것과 달리, 이 기술은 추가 학습 없이도 성능을 크게 끌어올린 것이 특징이다.
실제 '목표 찾기 시험(CoIN-Bench)'에서 20.3%의 성공률을 기록, 기존 방식(8.9%) 대비 약 2.3배 높은 정확도를 보였다.
연구팀은 RGB 카메라와 깊이 센서를 활용해 환경을 인식한 뒤, 문장과 일치할 가능성이 높은 영역에 점수를 부여하는 '가치 지도(Value Map)'를 기반으로 탐색 경로를 설정한다.
이후 비전 언어 모델을 통해 후보 물체의 속성과 주변과의 위치 관계를 정밀 검증한다.
특히 '소파 옆 테이블 위 빨간색 책'과 같은 복합적인 설명을 단순 정보가 아닌 3D 공간상의 관계로 해석해 탐색 효율과 정확도를 동시에 높인 점이 핵심이다.

(왼쪽부터) AI융합학과 김의환 교수, 장원식 석박통합과정생. (사진=GIST 제공) [email protected]
김의환 교수는 "물체 자체를 넘어 주변 맥락과 공간 관계까지 이해하는 기술"이라며 "별도 학습 없이도 새로운 환경에 적용 가능해 서비스 로봇 상용화의 기반이 될 것"이라고 말했다.
이번 연구는 과학기술정보통신부와 한국연구재단 등의 지원을 받아 수행했다. 연구 결과는 오는 6월3~7일 미국 콜로라도주 덴버(Denver)에서 열리는 AI 분야 국제학술대회 CVPR 2026에서 발표할 예정이다.
◎공감언론 뉴시스 [email protected]
Copyright © NEWSIS.COM, 무단 전재 및 재배포 금지