필드 위에서 축구공 자유자재…KAIST 휴머노이드 'v0.7'(영상)
등록 2026.03.20 06:02:00
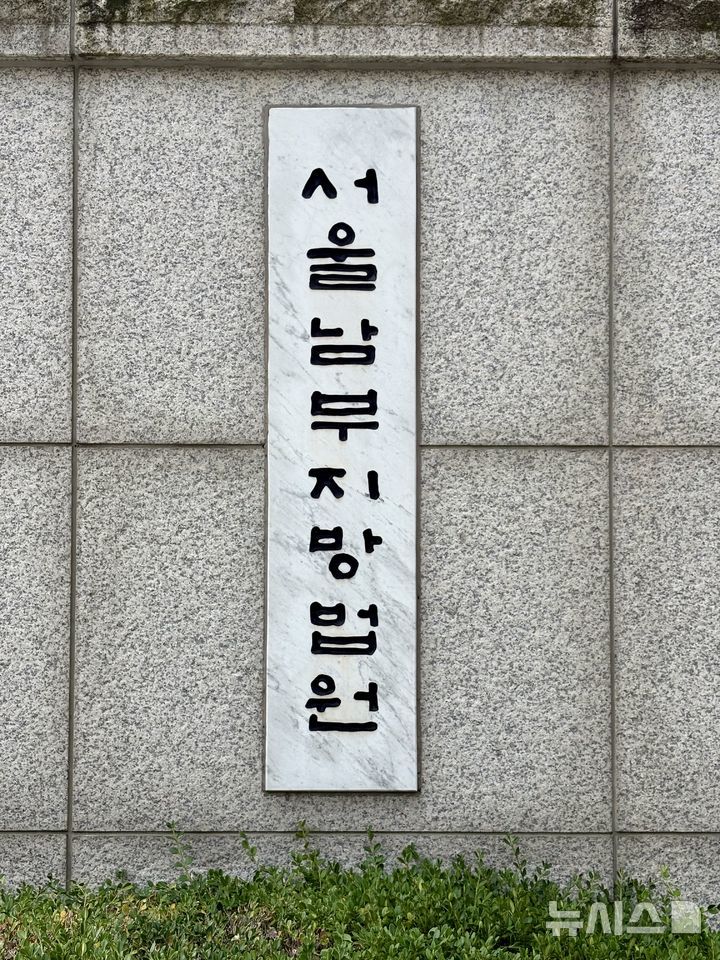
![[서울=뉴시스]한국과학기술원(KAIST)이 차세대 휴머노이드 로봇 'v0.7'은 공의 위치를 인식하고 다리를 뒤로 젖혔다가 휘두르는 일련의 과정을 매우 유연하게 수행했다. 자료 KAIST DRCR Lab 유튜브 *재판매 및 DB 금지](https://img1.newsis.com/2026/03/19/NISI20260319_0002087954_web.gif?rnd=20260319105427)
[서울=뉴시스]한국과학기술원(KAIST)이 차세대 휴머노이드 로봇 'v0.7'은 공의 위치를 인식하고 다리를 뒤로 젖혔다가 휘두르는 일련의 과정을 매우 유연하게 수행했다. 자료 KAIST DRCR Lab 유튜브 *재판매 및 DB 금지
지난 16일 KAIST DRCR Lab 유튜브에 공개된 영상에 따르면, 가장 눈길을 끈 대목은 로봇의 발길질이다. 과거 휴머노이드 로봇들이 미리 입력된 궤적에 따라 딱딱하게 움직였던 것과 달리, v0.7은 공의 위치를 인식하고 다리를 뒤로 젖혔다가 휘두르는 일련의 과정을 매우 유연하게 수행했다. 특히 공을 찬 직후 몸의 중심이 흔들리지 않도록 디딤발의 균형을 즉각적으로 잡는 모습은 인간의 운동 신경에 한층 다가선 결과로 평가받는다.
이 같은 성과는 KAIST가 오랜 기간 축적해온 휴머노이드 개발 역량의 집약체다. KAIST는 2002년 국내 최초의 인간형 보행 로봇인 'KHR-1'을 시작으로 대한민국 로봇의 대명사인 '휴보(HUBO)' 시리즈를 선보이며 세계적인 기술력을 입증해왔다. 2015년 세계 로봇 재난구조 대회(DRC)에서 우승을 차지했던 휴보가 바퀴와 보행을 병행하는 안정성에 집중했다면, 이번 v0.7은 인공지능(AI) 강화학습을 통해 가상 환경에서 학습한 움직임을 실제 환경에 그대로 구현하는 '심투리얼(Sim-to-Real)' 기술의 정수를 보여준다.
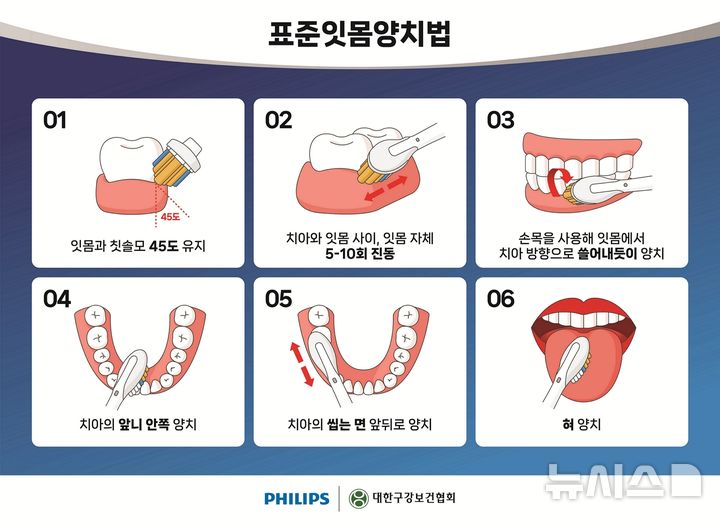
![[서울=뉴시스]연구팀은 로봇의 모터와 감속기, 제어기 등 핵심 부품을 독자 설계하여 하드웨어적 독립성을 확보했다. 문워크나 오리걸음 같은 고난도 동작까지 소화할 수 있다. 자료 KAIST DRCR Lab 유튜브 *재판매 및 DB 금지](https://img1.newsis.com/2026/03/19/NISI20260319_0002087955_web.gif?rnd=20260319105501)
[서울=뉴시스]연구팀은 로봇의 모터와 감속기, 제어기 등 핵심 부품을 독자 설계하여 하드웨어적 독립성을 확보했다. 문워크나 오리걸음 같은 고난도 동작까지 소화할 수 있다. 자료 KAIST DRCR Lab 유튜브 *재판매 및 DB 금지
최근 KAIST는 사족보행 로봇 '라이보 2'가 마라톤 풀코스를 완주하며 보행 로봇의 효율성과 내구성을 증명한 바 있다. 이번 휴머노이드 v0.7의 성공적인 필드 테스트는 사족보행 기술에서 확보된 높은 제어 능력이 이족보행 플랫폼으로까지 완벽히 전이되었음을 보여준다.
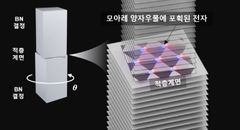
![[대전=뉴시스] KAIST 연구진이 라이보2의 마라톤 풀코스 완주 후 단체 기념촬영을 하고 있다.(사진=KAIST 제공) *재판매 및 DB 금지](https://img1.newsis.com/2024/11/17/NISI20241117_0001705540_web.jpg?rnd=20241117182304)
[대전=뉴시스] KAIST 연구진이 라이보2의 마라톤 풀코스 완주 후 단체 기념촬영을 하고 있다.(사진=KAIST 제공) *재판매 및 DB 금지
◎공감언론 뉴시스 [email protected]
Copyright © NEWSIS.COM, 무단 전재 및 재배포 금지